Montreal, Canada, February 21st, 2023 – SimActive Inc., a world-leading developer of photogrammetry software, announces the use of its lidar point cloud colorization capabilities by users of multi-sensor systems developed by LiDARUSA. SimActive’s Correlator3D™ software allows to profit from imagery and lidar data in a complimentary fashion.
Lidar point clouds are first imported in Correlator3D™, to which the collected imagery is automatically registered. The lidar data are used as control for the registration process. Each lidar point is then colorized using the images.

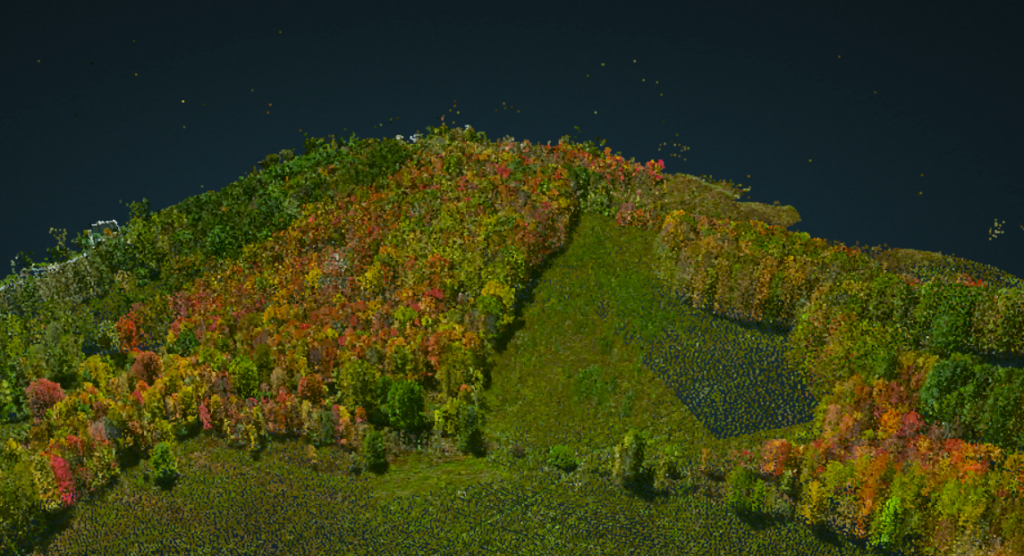
“While lidar is great, everyone understands imagery. Colorizing lidar makes the data much more understandable”, said Jeff Fagerman, CEO at LiDARUSA. “Correlator3D allows our clients to easily colorize lidar point clouds from their multi-camera system.”
About LiDARUSA
LiDARUSA, also known as Fagerman Technologies, is a family-owned business just outside of Huntsville, AL. LiDARUSA specializes in laser scanning, photogrammetry, instrumentation and all things geomatics. Years of experience working on best-in-class products have developed our sense of quality and leadership necessary to build only the best systems. For more information, visit www.lidarusa.com.
About SimActive
SimActive is the developer of Correlator3D™ software, a patented end-to-end photogrammetry solution for the generation of high-quality geospatial data from satellite and aerial imagery, including drones. Correlator3D™ performs aerial triangulation (AT) and produces dense digital surface models (DSM), digital terrain models (DTM), point clouds, orthomosaics, 3D models and vectorized 3D features. Powered by GPU technology and multi-core CPUs, Correlator3D™ ensures matchless processing speed to support rapid production of large datasets. SimActive has been selling Correlator3D™ to leading mapping firms and government organizations around the world, offering cutting-edge photogrammetry software backed by exceptional customer support. For more information, visit www.simactive.com.
This article was published by: LidarMag-Editor
Visit the original article here