Fusing Aerial and Mobile LiDAR Data
Company: Caltech Group
CHALLENGE
Companies looking to perform large scale, high resolution mapping projects with budget restrictions and time constraints struggle using traditional surveying methods.
Caltech’s team of surveyors, engineers, CAD experts, technologists, and GIS specialists has spent the last 30+ years becoming Western Canada’s go-to company for geomatics services. Caltech provides services to many oil & gas utility clients. These clients demand some of the highest standards pertaining to data quality.
Caltech was contacted to generate a facility as-built of a site consisting of a myriad of pipes, buildings, and equipment. Using the mapping tools on hand, it would have been very difficult to complete the project, at least not to the level of accuracy that would be useful to the client. The only tool that could have been used was a terrestrial laser scanner, but due to the size of the facility – it was just not feasible.
SOLUTION
Caltech Group invested in a RANGER-LR mapping solution from Phoenix LiDAR Systems, allowing them to rapidly scan as built facilities with high accuracy in a single day – the main motivator for acquiring a dual purpose UAS and terrestrial mapping system.
The derived data deliverables acted as a ‘digital twin’ of their clients’ facilities, empowering the end users to digitally visit their facilities and make informed decisions. The value-added ability to easily disseminate 3D geospatial data in a user-friendly format facilitated collaboration with people across all skill levels – both internally within their organizations and externally with subcontractors.
ACQUISITION
Step 1: Caltech accomplished the complex facility as-built mapping project by first mounting the RANGER-LR payload with 360-degree Ladybug camera to a truck
and traversed through the site collecting 360 degree high density lidar and spherical imagery.
Step 2: After the drive, they removed the payload from the truck, mounted the Sony A7R2 camera to it, and affixed the payload to an Alta X UAV, all without leaving the job site. This configuration enabled them to quickly collect aerial high-density lidar and imagery over the facility.
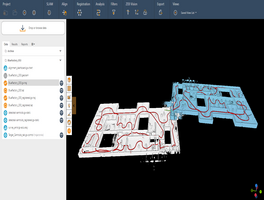
Step 3: The final step was to merge both the mobile and aerial pointclouds into a single cohesive dataset to be shared with the end user.
RESULTS

Deploying the vehicle adaptable RANGER-LR mapping solution allowed Caltech to successfully complete the data collection and turn around the deliverable facility as-built within a very short timeline. All project deliverables met or exceeded ASPRS accuracy specifications. The combination of rapid data collection, processing time,
and data quality resulted in additional customer quotations for larger projects, subsequently awarded to the Caltech team.
For the complete article CLICK HERE.
Greg Stamnes, AscT, CMS – Geospatial Manager
Caltech Group
Note – If you liked this post click here to stay informed of all of the 3D laser scanning, geomatics, UAS, autonomous vehicle, Lidar News and more. If you have an informative 3D video that you would like us to promote, please forward to editor@lidarnews.com and if you would like to join the Younger Geospatial Professional movement click here.